

TÉCNICAS UTILIZADAS
1 Aquisição das imagens
1.1 Câmeras
Foram utilizadas duas câmeras, uma Canon EOS Rebel D, com resolução de 3072x2048 pixels e uma Canon EOS Rebel XT de 3456x2304 pixels, ambas com uma lente zoom de 18 - 55 mm e f/3.5 - f/6.3. As fotografias da esquerda foram tiradas com a Rebel XT e as da direita com a Rebel D.
Fig 01 - Canon EOS Rebel D e Rebel XT
1.2 Luz estruturada
Os padrões de luz estruturada utilizadas neste trabalho foram os propostos por Asla et al. em "(b, s)-BCSL : Structured Light Color Boundary Coding for 3D Photography". Foram tiradas fotografias com os padrões (3,2), (4,2) e (6,2). Contudo foram utilizados essencialmente as imagens obtidas a partir do padrão (3,2).

Fig 02 - Padrões de projeção (3,2)-BCSL
1.3 Montagem do aparato
Para a aquisição das imagens foram utilizados um projetor, para projetar luz estruturada sobre os objetos, e duas câmeras para capturar as imagens dos objetos e do padrão de calibração. Como todo esse processamento é um processo construtivo, o resultado de cada etapa afeta os resultados das etapas posteriores. Desta forma, as circunstâncias que envolvem a aquisição das imagens afeta todo o restante do processo. A baixo segue uma lista de detalhes que podem afetar negativamente o processo de reconstrução.

Fig 03 - Montagem do aparato câmera, projetor e cenário (apenas uma câmera)
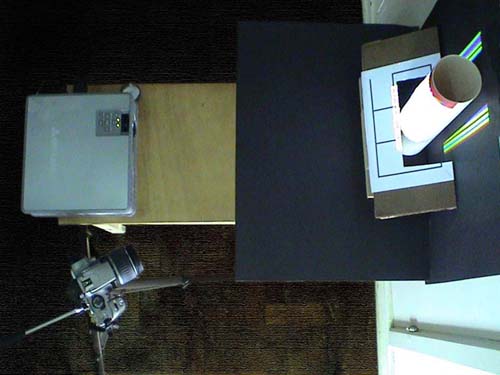
Fig 04 - Montagem do aparato câmera, projetor e cenário (apenas uma câmera)
O tempo de exposição deve ser tão pequeno quanto possível e a sensibilidade da captura a menor possível para minimizar o ruído de captura. As fotografias foram capturadas com as câmeras ajustadas em ISO 100.
O ideal é que as imagens sejam capturadas num formato sem compressão ou de compressão sem perda de qualidade. Para este trabalho foram capturadas aproximadamente 400 imagens. As câmeras usadas não oferecem recursos para captura sem compressão, mas permitem fazer a captura com compressão sem perda de qualidade no formato RAW. Contudo, mesmo nesse formato os arquivos gerados têm um tamanho pouco prático para a quantidade de fotografias tiradas. Todas as imagens foram capturadas no formato JPEG, mas com o máximo de qualidade possível.
1.3.3 Bordas entre pixels do projetor
Essa bordas pretas causam alguma degradação nas imagens obtidas, principalmente nas áreas onde a luz emitida pelo projetor mais tangencia a superfície do objeto.
Fig 05 - Franjas causadas pelas bordas dos pixels
O objeto deve ser iluminado pelo mínimo possível de luz ambiente.
1.3.5 Vazamento da projeção para o fundo
geralmente não se quer que o fundo por traz do objeto seja reconstruído. Assim, os objetos foram fotografados contra um fundo de carpete negro.
1.3.6 Textura do objeto
Cores escuras na superfície do objeto dificultam a identificação da cor da faixa que está sendo projetada sobre ele. Nem sempre se pode controlar este fator.
1.3.7 Sombra e sombreamento no objeto
Nas áreas de sombra é impossível recuperar a geometria. Áreas que são iluminadas tangencialmente ficam sombreadas e dificultam a identificação da cor da faixa. Capturas de ângulos diferentes podem resolver esse problema.
1.3.8 Reflexão especular
A reflexão especular na superfície cria áreas esbranquiçadas que dificultam a identificação da cor da faixa. Capturas de ângulos diferentes podem resolver esse problema.
1.3.9 Movimento relativo das câmeras e do projetor
Durante todo o processo as câmeras e o projetor devem permanecer absolutamente imóveis. Todas as fotografias foram tiradas por controle remoto, a partir de computadores aos quais as câmeras estavam conectadas.
1.3.10 Distorção radial das lentes da câmera
Certas lentes podem apresentar distorções nas bordas das imagens. As lentes das câmeras utilizadas apresentaram menor distorção radial na distância focal de 55 mm e foram mantidas desta forma durante todo o processo
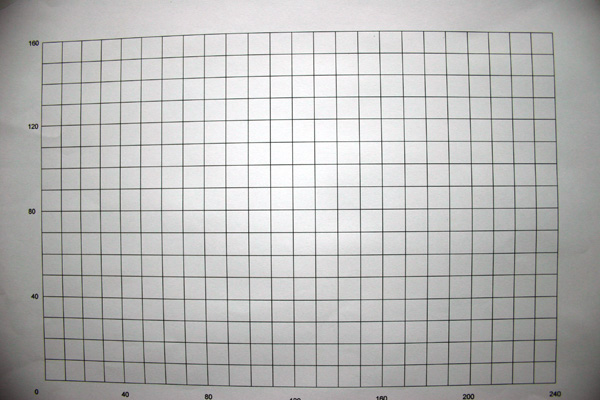
Fig 06 - Distorção radial com a distância focal da lente ajustada em 18 mm
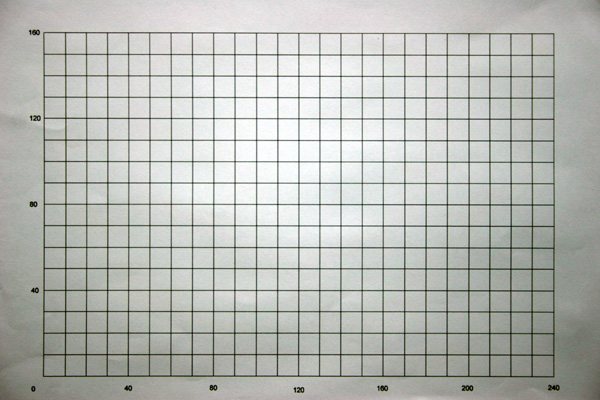
Fig 07 - Distorção radial com a distância focal da lente ajustada em 55 mm
1.3.11 Varredura vertical do LCD ou DLP do projetor
Ocorre uma grande distorção cromática das imagens quando as fotografias são tiradas com velocidades altas. Por isso as câmeras tiveram de ser ajustadas para tempos de exposição de 1/4 s.
1.3.12 Aberração cromática das lentes
As lentes utilizadas apresentaram uma aberração cromática (diferentes pontos de foco para diferentes comprimentos de onda da luz) aceitável.
Fig 08 - Aberração cromática da lente da câmera na distância focal de 18 mm
Fig 09 - Aberração cromática da lente da câmera na distância focal de 55 mm
1.3.13 Foco do projetor
As lentes dos projetores possuem geralmente profundidade de campo bastante pequeno. Como os objetos fotografados eram relativamente pequenos (maior dimensão de aproximadamente 20 cm) o projetor teve de ser colocado bastante próximo dos objetos (80 cm). Isso tornou a profundidade campo bastante crítica, não possibilitando que os padrões de calibração e os objetos ficassem totalmente dentro da área de foco do projetor.
1.3.14 Foco das câmeras
O foco das câmeras deve ser preciso para garantir bordas nítidas nas faixas. Como as câmeras possuem foco automático, ele teve de ser ajustado para uma posição intermediária dentro do cenário e desligado para que não fosse alterado durante a tomada das fotografias. Contudo, o foco não teria sido crítico pois as câmeras tiveram que ter seus diafragmas fechados ao máximo para se poder obter um tempo de exposição tão longo como o citado acima.
1.3.15 Posição do padrão de calibração em relação às câmeras
O padrão de calibração deve ser convenientemente posicionado de forma a permitir que a distância focal seja corretamente calculada.
2 Calibração da câmera e projetor
Parte dos modelos foram obtidos com calibração apenas das duas câmeras e parte com a calibração das câmera e do projetor. No caso em que foram calibradas apenas das câmeras foi utilizado o método de Tsai 2D combinado com as técnicas propostas por Szemberg. Para o caso em que foi feita também a calibração do projetor foi usada a técnica proposta por Pribanic et al.
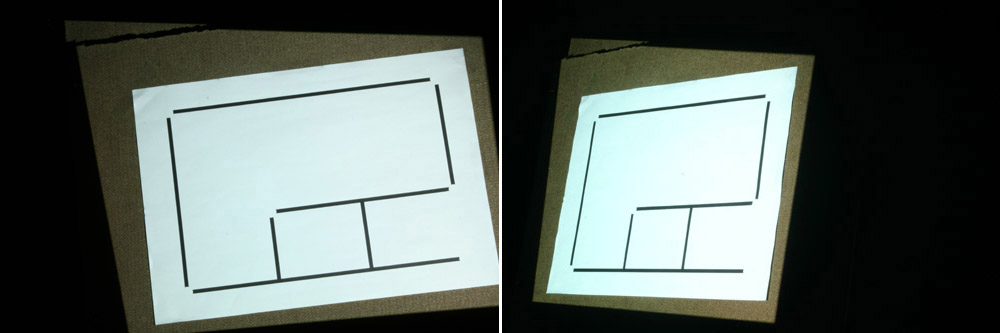
Fig 10 - Imagens de calibração das câmeras esquerda e direita
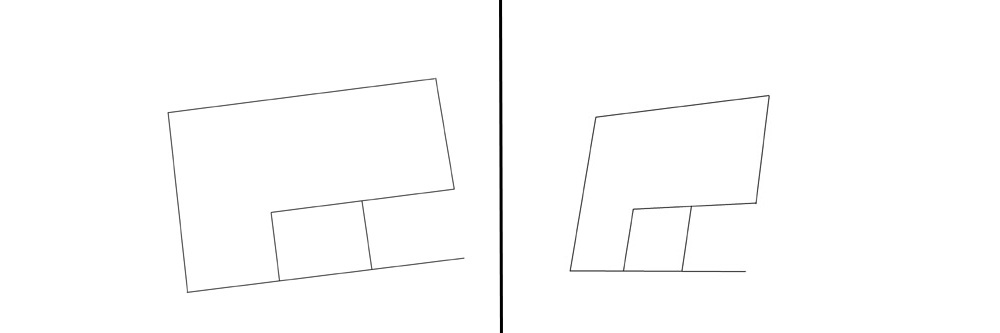
Fig 11 - Imagens de calibração esquerda e direita realçadas
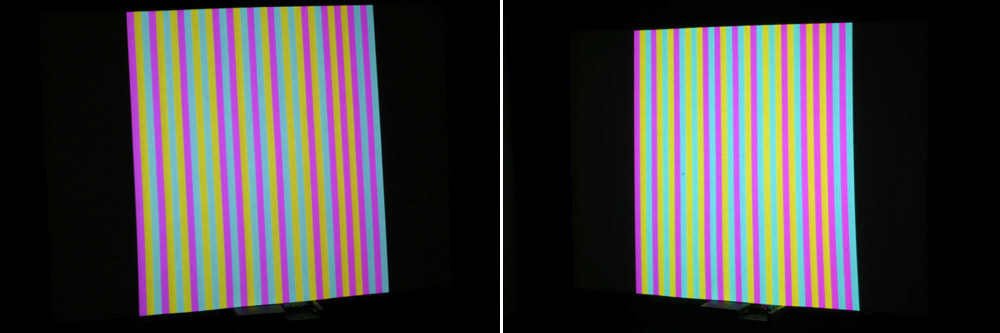
Fig 12 - Imagens de calibração esquerda e direita usadas para a reconstrução 3D pelo método de calibração implícita do projetor proposto por Pribanic et al.
3 Extração das curvas de nível das imagens
A reconstrução que segue foi feita utilizando o padrão de luz estruturada (3,2) BCSL.
Para extrair as curvas de nível das imagens capturadas essas imagens foram submetidas a um processo de tratamento dividido em cinco fases:
3.1 Subtração das imagens positivas das negativas.
Essa etapa realçou as faixas positivas (vermelho verde e azul), em especial nas áreas cobertas por partes escuras da textura.
3.2 Saturação da imagem
As imagens foram saturadas no canal de maior intensidade. Deste modo foi possível destacar as faixas nas áreas sombreadas e de textura escura.
3.3 Remoção manual do fundo
Em um programa de edição de imagens o fundo foi manualmente removido pois não interessava a sua reconstrução.
3.4 Preenchimento de falhas entre as faixas
Depois da última fase restaram finas linhas pretas entre as faixas. Elas foram preenchidas com as cores adjacentes, dentro de um certo limite, pois algumas partes pretas eram decorrentes de sombras.
3.5 Extração das curvas de nível
A partir das transições entre as faixas e de acordo com o padrão de luz estruturada (3,2) BCSL foram extraídas as curvas de nível das imagens da esquerda e da direita.

Fig 13 - Objeto com iluminação natural
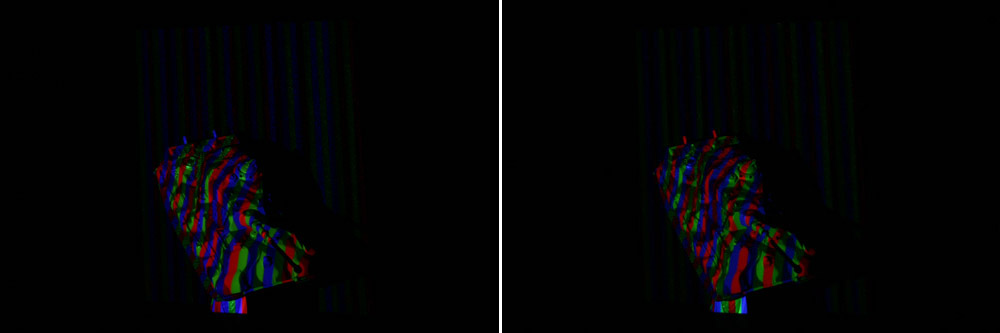
Fig 14 - Iluminação com os padrões positivos 1 e 2

Fig 15 - Iluminação com os padrões negativos 1 e 2

Fig 16 - Imagens resultantes da subtração das imagens positivas pelas negativas
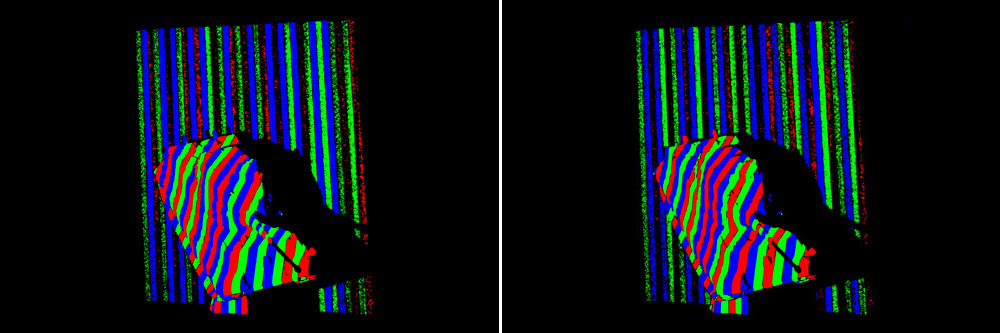
Fig 17 - Imagens resultantes saturadas para o realce das faixas
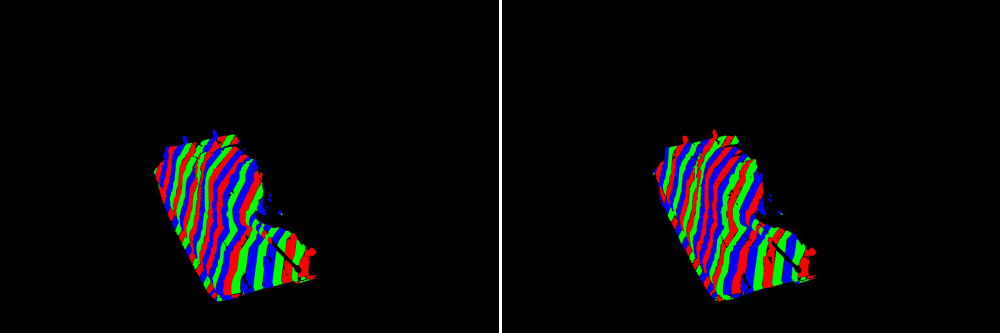
Fig 18 - Limpeza manual de ruídos

Fig 19 - Preenchimento de falhas entre as faixas
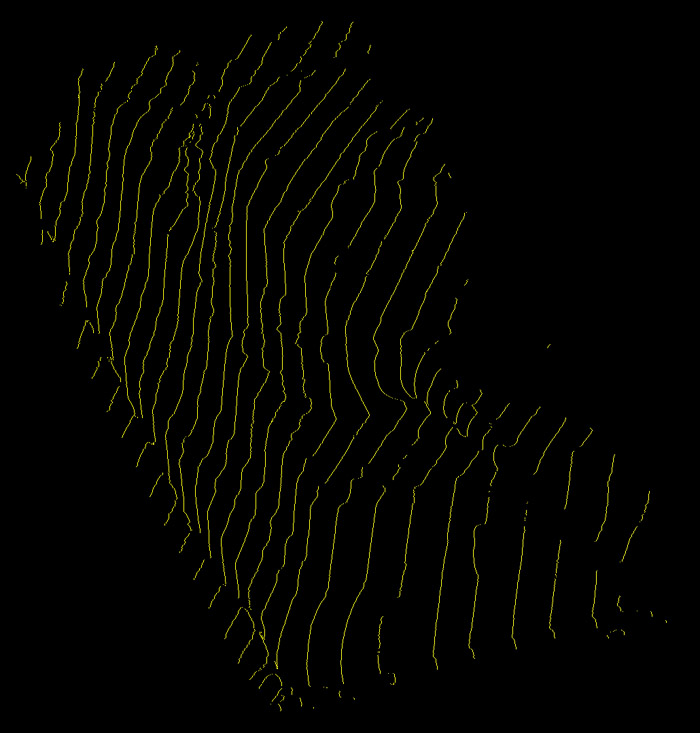
Fig 20 - Curvas de nível da imagem da direita
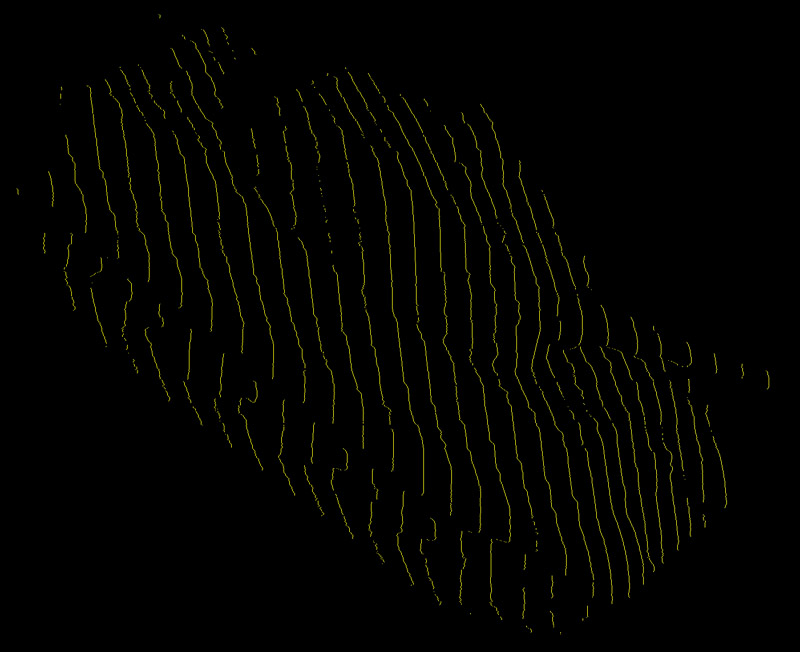
Fig 21 - Curvas de nível da imagem da esquerda
4 Cálculo da nuvem de pontos
As núvens de pontos foram obtidas a partir de dois processos:
4.1 Geometria epipolar
Usando as curvas de nível da imagem da esquerda e da direita foi calculada a nuvem de pontos através da matriz fundamental obtida dos parâmetros de clibração das duas câmeras.
4.2 Calibração implícita do projetor
Usando fotografias das faixas projetadas em superfíceis planas foipossível calcular as equações desses planos no sistema de coordenadas de cada câmera. A partir daí a reconstrução pôde ser feita usando tanto as curvas de nível da imagem da esquerda quanto da direita.
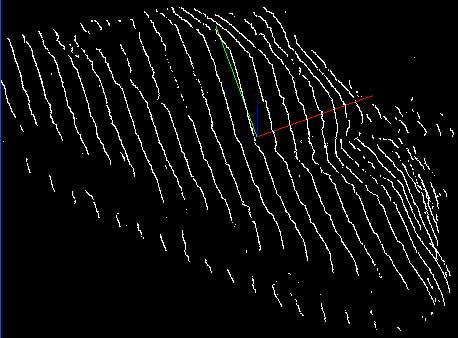
Fig 22 - Núvem de pontos
5 Triangulação da superfície
A partir da nuvem de pontos e sabendo a qual curva de nível pertence cada ponto foi feita a triangulação da superfície
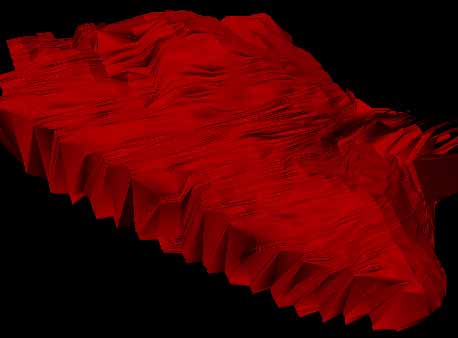
Fig 23 - Superfície triangulada e sombreada
6 Avaliação dos resultados
As nuvens de pontos foram utilizadas para avaliar danos em objetos, em particular a tubos. Usando o método de minimização de Lebenberg-Marquard foi possível calcular o melhor ajuste da nuvem de pontos de um cilindro danificado a um cilindro e partir daí fazer estimativas do dano.
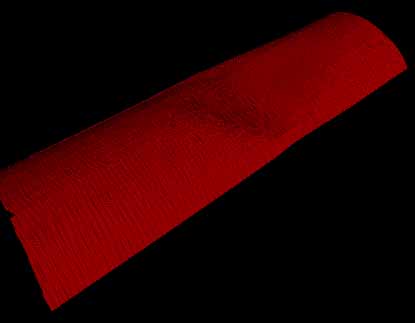
Fig 24 - Cano amassado triangulado
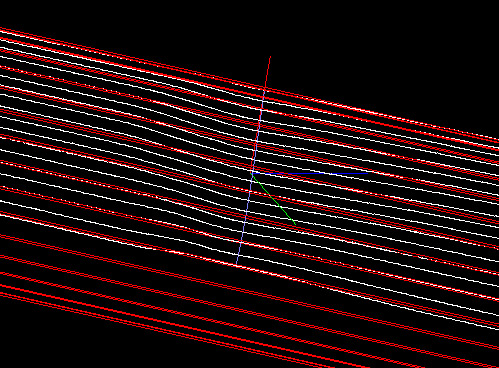
Fig 25 - - Cano amassado ajustado a um cilindro
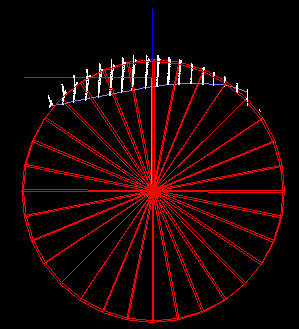
Fig 26 - Cano amassado ajustado a um cilindro