Realidade
Aumentada
Daniel Ribeiro Trindade
___________________________________________________________________________________________________
Trabalho
1 - Detecção de cantos
Objetivo
Criar
um programa para detecção de cantos em imagens em video
utilizando o detector de cantos de Harris [1].
Como foi
feito
O
programa foi feito em C e foram utilizadas as seguintes bibliotecas:
- OpenCv [2]
- Opengl [3]
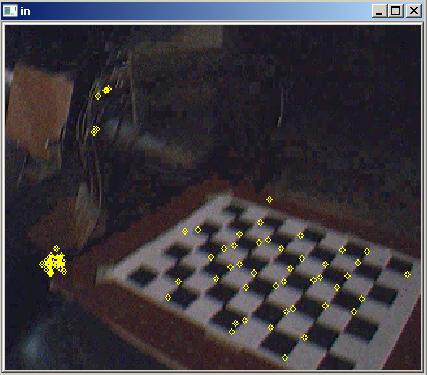
Figura 1
Trabalho
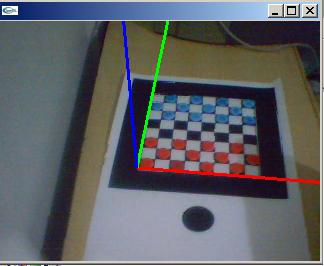
2 - Calibração de Câmera
Objetivo
Calibrar
uma câmera a partir de um video de um tabuleiro de xadrez e
desenhar um objeto tridimensional que seja coerente com a cena.
Como foi
feito
O
programa foi feito em C e foram utilizadas as seguintes bibliotecas:
- OpenCv
- Opengl
A
calibração da câmera foi feita baseada no
método de Tsai [4]. A implementação utilizada pode
ser encontrada em [5].

Figura 2
Código
Executável
___________________________________________________________________________________________________
Trabalho 3 -
Jogo de Damas em Realidade Aumentada
Objetivo
Criar
um jogo de damas que possibilte o embate entre computador e ser humano,
e que faça uso de realidade aumentada. O programa deve ser capaz
de reconhecer um tabuleiro de damas 8 x 8, assim como os movimentos das
peças que estão localizadas sobre ele. A partir
dessas informações, o computador também tem de
realizar uma jogada contra o oponente real.
Funcionamento
do Jogo
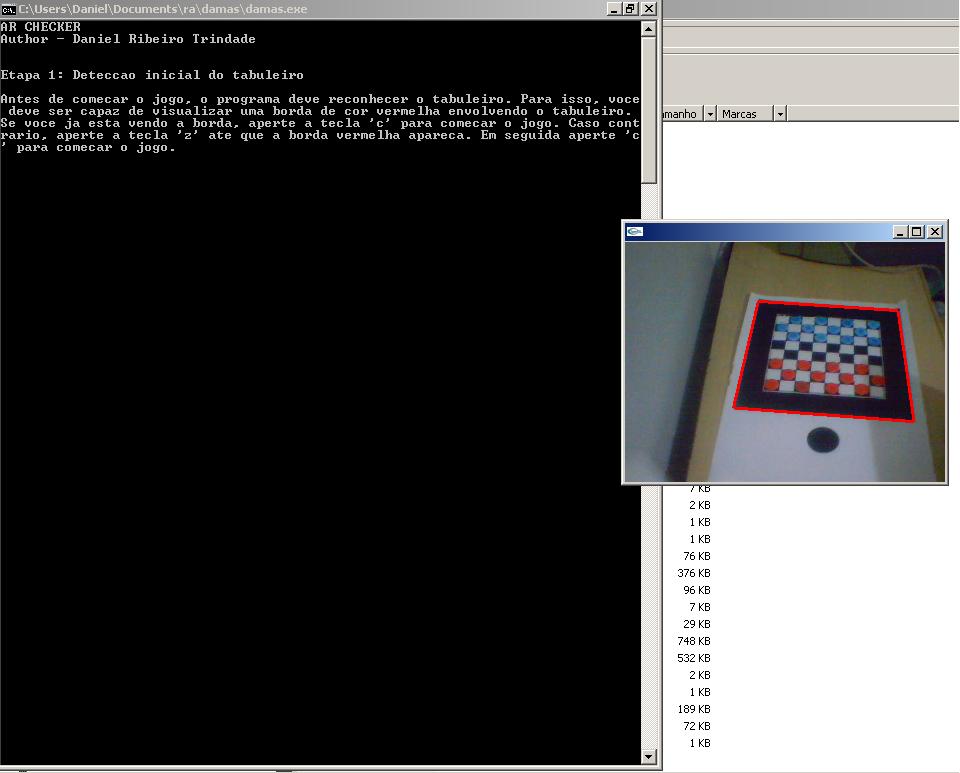
Primeiramente,
há uma etapa onde é preciso ajustar a
função de detecção para que ela possa
encontrar o tabuleiro de damas corretamente. Para isso, o
usuário deve apertar a tecla 'z' até que uma borda de cor
vermelha apareça em volta do tabuleiro, como mostra a figura 3.
Essa etapa é necessária devido a variações
de luz no ambiente.
Figura
3
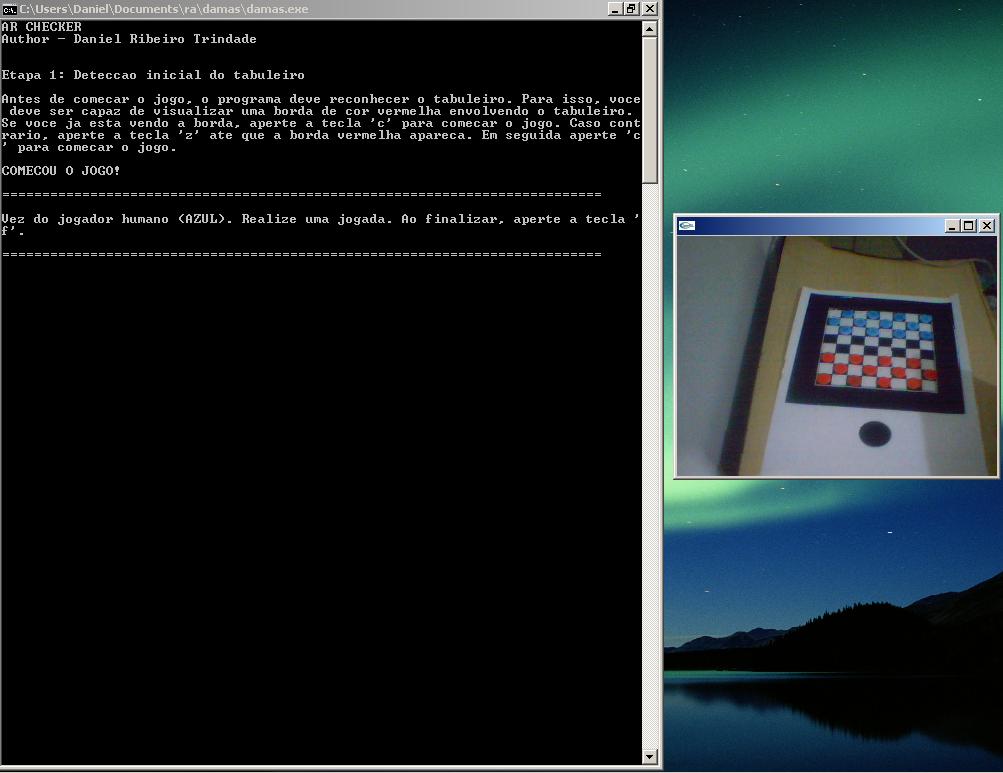
Depois
que a borda aparece, o jogo já pode começar. Quando o
usuário
aperta a tecla 'c', o jogo começa. Nesse ponto o programa
reconhece as
peças e monta um tabuleiro virtual.
Importante:
- As peças devem ser
vermelhas e azuis.
- As peças azuis
representam o jogador real. As vermelhas representam o computador.
- As peças vermelhas devem
estar dispostas inicialmente no lado do tabuleiro mais próximo
do circulo preto, e as azuis no lado oposto, como mostra a figura 1.
Quem joga primeiro é
sempre o jogador real. Sempre que for a vez desse, o programa vai pedir
que seja feita uma jogada no tabuleiro real. O jogador então
aperta a tecla 'f' indicando que a jogada foi finalizada. A figura 3
ilustra esse momento.
Figura
3
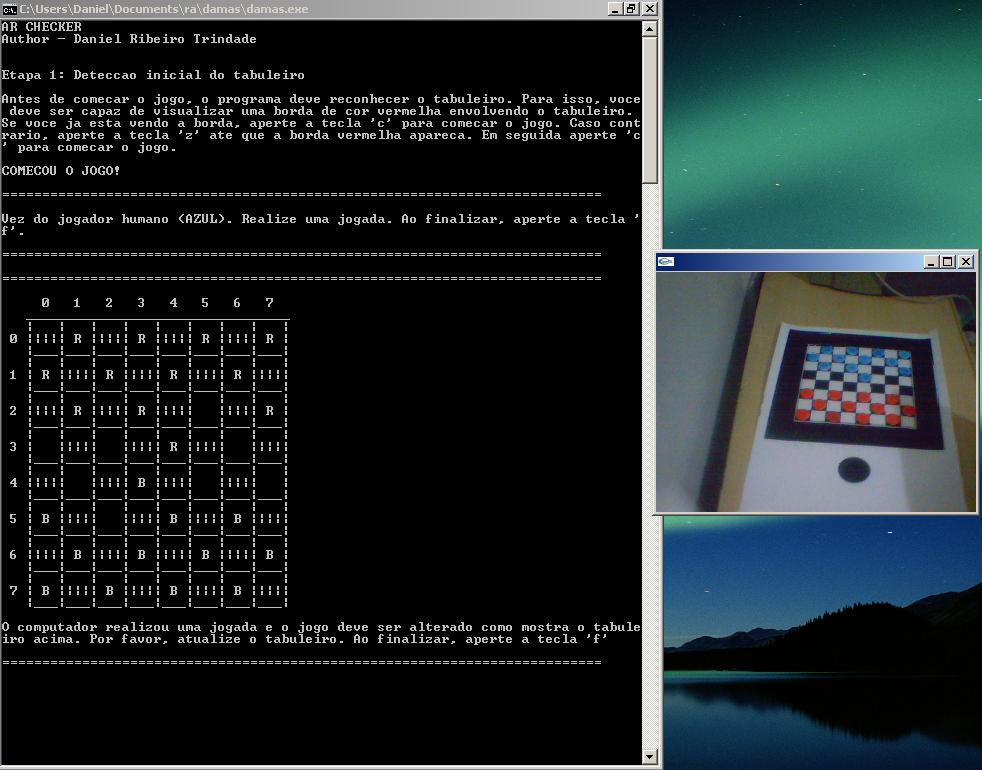
Quando
o jogador aperta a tecla 'f', o programa detecta a nova
configuração do tabuleiro real e atualiza o tabuleiro
virtual. Logo em seguida, o computador realiza uma jogada. Isso
é feito através de uma engine para jogo de damas. Essa
engine recebe o tabuleiro virtual e o retorna já atualizado com
a jogada do computador. A configuração final do tabuleiro
é impressa na tela e o programa pede que o jogador atualize o
tabuleiro real ( figura 4 ).
Figura
4
Ao
apertar a tecla 'f', a vez volta a ser do jogador e o programa volta a
esperar por uma jogada.
No processo descrito acima, a
detecção do tabuleiro e das peças só
é feita em dois momentos:
1. Na finalização
da etapa inicial, quando é necessário montar a
configuração inicial do tabuleiro.
2. Toda vez que o usuário
terminar uma movimentação de peças e apertar a
tecla 'f'.
Ainda, toda vez que é
feita uma detecção, conta-se a quantidade de peças
azuis e vermelhas existentes no tabuleiro. Isso possibilita que o
programa verifique se já há ganhador.
Como foi
feito
O
desenvolvimento do programa foi feito em C e foram usadas as seguintes
bibliotecas:
- ArToolkit [6] -> kit de
desenvolvimento de software para Realidade Aumentada.
- Simplech [7] -> Engine de
jogo de damas.
- Opengl
O programa consiste nos seguintes
passos:
Passo
1: Detecção do tabuleiro
A detecção do
tabuleiro é feita através da função arDetectMarker ( ArToolkit ). Essa
função é capaz de detectar regiões
retangulares na imagem. No caso do tabuleiro de damas, foi posta
uma moldura em volta do tabuleiro para melhorar o processo de
detecção.
Importante:
arDetectMarker detecta
não só a moldura do tabuleiro, como também pode
detectar alguns dos quadrados menores contidos no próprio
tabuleiro. Para evitar que um desses últimos seja usado no
processo de calibração, usa-se sempre o retângulo
que tem maior área.
Figura
5
Passo 2: Calibração de
câmera
A calibração de
câmera usando a função arGetTransMat ( ArToolkit ). Essa
função recebe o retângulo detectado no passo 1 e
retorna a matriz de Modelview. A origem do sistema de coordenadas do
sistema 3D resultante é no centro do tabuleiro.
Passo
3: Estabilidade do sistema de coordenadas
O sistema de coordenadas
resultante do passo 2 não é estável e pode mudar a
direção dos eixos X e Y em relação à
imagem. Para evitar que isso aconteça, o sistema de coordenadas
é estabecido com base no circulo externo ao tabuleiro. Isso
é feito da seguinte forma:
- Faça uma
amostragem em uma região qualquer da moldura do tabuleiro, tal
que essa região tenha área menor do que a do circulo.
Essa amostragem consiste na média das componentes RGB de um
conjunto de pixels.
- Faça quatro
amostragens, uma em cada lado do tabuleiro, no local onde o circulo
deveria estar.
- Compare essas quatro
amostragens com a primeira. A que mais se aproximar com a primeira,
fornece a posição do circulo.
- Com base na
posição do circulo em relação ao sistema de
coordenadas estabelecido no passo 2, transforme o sistema de
coordenadas para que ele sempre fique com
uma orientação fixa em relação ao
circulo.
O resultado final pode ser visto
na figura 6.
Figura
6
Passo 4:
Pré-detecção das peças
A detecção de uma
peça no tabuleiro é feita de forma parecida com o
processo descrito no passo 3. Faz-se uma amostragem de pixels em
uma região do tabuleiro onde há possibilidade de uma
peça estar, por exemplo, nos quadrados pretos do tabuleiro. Essa
amostragem resulta em uma tupla RGB. Para saber se a
posição amostrada contém uma peça branca,
azul ou não contem uma peça, é preciso comparar o
resultado dessa amostragem com valores RGB referentes a peças
vermelhas, azuis ou quadrados sem peças.
O objetivo desse passo é
achar esses valores de referência. Para isso, observe que, de
posse do sistema de coordenadas estabelecido no passo 3, é
possível determinar as posições do tabuleiro com
certa precisão, como mostra a figura 7:
Figura
7
Assumindo
que no ínicio todas as peças estão em seus lugares
corretos, é possível estabelecer os valores RGB de
referência da seguinte forma:
- Para cada posição
que deveria conter uma peça de determinada cor,
faça uma amostragem de pixels.
- Tire a média dessas
amostragens. O resultado é o valor RGB de referência para
aquele tipo de peça.
Isso é feito não
somente para as posições que podem conter peças
vermelhas ou azuis, mas também para posições que
não contêm nenhuma peça. Dessa forma, ao final
existem três valores RGB de referência: um para
posições que contém peças vermelhas, um
para azuis e um para as que não contém nenhuma
peça.
Passo
5: Detecção de peças e construção do
tabuleiro virtual
Esse passo consiste em detectar
em um dado momento que posições do tabuleiro estão
ocupadas e que tipo de peças as estão ocupando. Uma vez
que foram determinados os valores RGB de referência para
posições com peças vermelhas, azuis ou sem
peças, para verificar se uma dada posição do
tabuleiro contém ou não uma peça de uma
determinada cor, basta realizar uma amostragem de pixels na
posição. Através da comparação do
resultado dessa amostragem com cada um dos valores de referência
é possível determinar o estado em que se encontra a
posição. Uma vez feito isso, a construção
do tabuleiro virtual é trivial.
Passo
6: Realização de uma jogada por parte do computador
O último passo possibilita
que o computador faça uma jogada baseada no estado atual do
tabuleiro. Isso é relativamente fácil, uma vez que
já existem engines de damas prontas que podem fazer a jogada. A
função que realiza uma jogada para o computador é getmove ( Simplech ). Ela recebe o
tabuleiro atual e retorna o tabuleiro modificado pela
realização de uma jogada automática.
Código
e executável
Código
Executável
___________________________________________________________________________________________________
Referências
[1] Chris Harris and Mike Stephens,
Proceedings of The Fourth Alvey Vision Conference, Manchester, pp
147-151. 1988
[2] OpenCV, Open Source Computer Vision Library, http://sourceforge.net/projects/opencvlibrary/
[3] OpenGL, www.opengl.org
[4] Roger Y Tsai, A Versatile Camera
Calibration Techniaue for High-Accuracy 3D Machine Vision
Metrology Using Off-the-shelf TV Cameras and Lenses, IEEE
JOURNAL OF ROBOTICS AND AUTOMATION, VOL. RA-3, NO. 4, AUGUST 1987
[5] http://www.tecgraf.puc-rio.br/~mgattass/ra/software/tsai.zip
[6] ARToolKit
, http://www.hitl.washington.edu/artoolkit/
[7]
http://www.fierz.ch/engines.php