![]()
Go back one level
In this work, I apply the Zhang camera calibration method to find intrinsic (focal length, etc.) and extrinsic (rotation, translation) parameters for three real and one virtual camera (whose calibration results are shown in the image below).
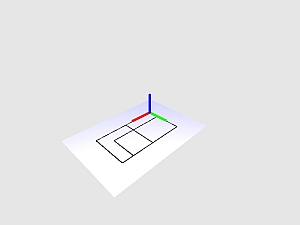 XY plane of the sample |
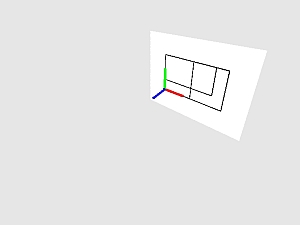 YZ plane of the sample |
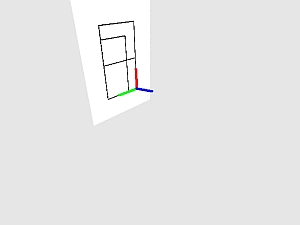 ZX plane of the sample |
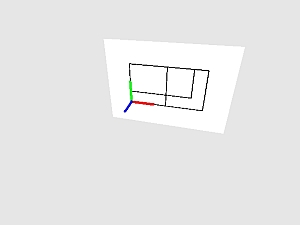 Inclined sample |
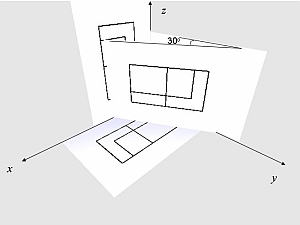 Image depicting all four sample planes together |
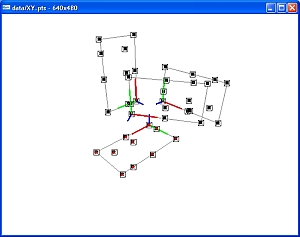 Results of camera calibration, and re-projection |
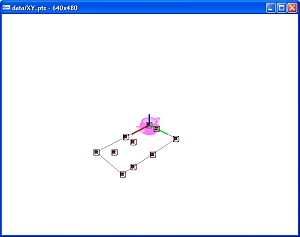 Projecting the teapot on XY plane |
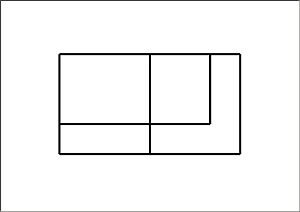 Pattern used for recognition |
Go back one level
Rio de Janeiro, dezembro 2006.