Calibração de Câmera
O problema de calibrar uma câmera é o de estimar seus parâmetros intrínsecos e extrínsecos. A forma mais natural de calibração consiste em obter, na imagem, um conjunto de pontos p1, p2,
..., pn que correspondam a pontos conhecidos P1, P2, ..., Pn do espaço tridimensional e obter os valores dos parâmetros intrísecos tais que as imagens p’1, p’2, ..., p’n obtidas com uma câmera, com estes parâmetros, estejam o mais próximo possível das imagens observadas, de acordo com uma certa medida de erro.
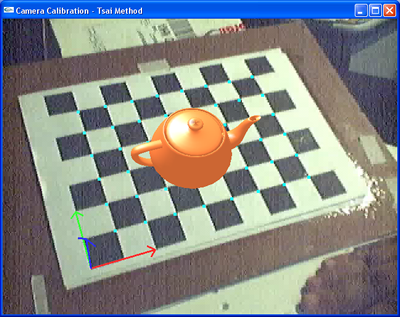
O objetivo deste segundo trabalho foi calibrar uma câmera a partir de um padrão colocado na cena. O padrão utilizado foi o de xadrez e colocou-se na cena um tabuleiro de xadrez com dimensões conhecidas.
A partir de um stream de vídeo de entrada (vindo a partir de um arquivo ou de uma webcam), encontramos os cantos internos do tabuleiro e em seguida, utilizando o método de Tsai para calibração de câmeras encontramos os parâmetros intrínsicos e extrínsicos da câmera.
Tendo em mãos esses parâmetros, inserimos objetos virtuais na cena.
Neste exemplo, foi colocado um teapot sobre o tabuleiro de xadrez.
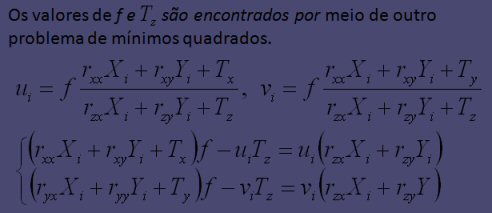
Um pouco sobre o método de Tsai para calibração de câmeras
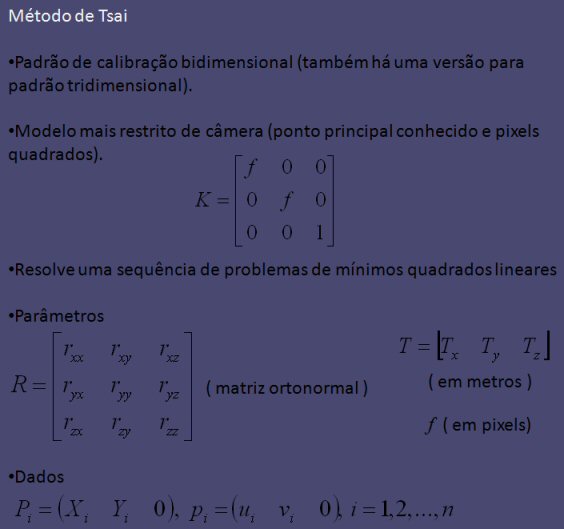
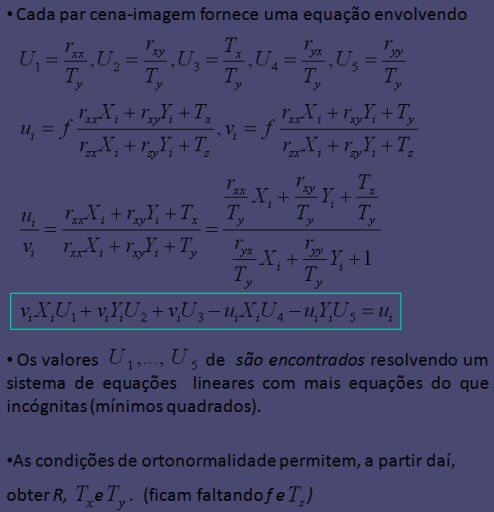
Em um artigo clássico, Roger Tsai propôs um método simples de calibração de câmeras. Na verdade, Tsai propôs dois métodos distintos. Abaixo, descrevemos sem muitos detalhes a versão coplanar, que se aplica à situação em que todos os pontos utilizados para calibração estão situados em um único plano.
Antes de falar sobre o método de Tsai precisamos rever os sistemas de coordenadas.
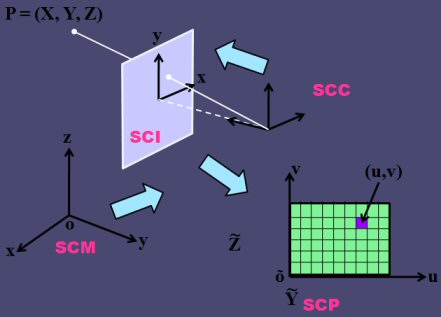
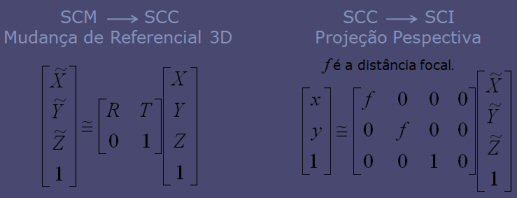
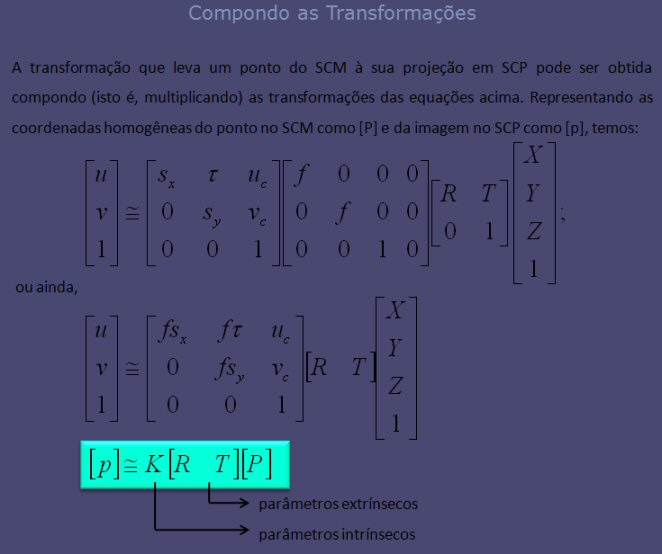
Para expressar a correspondência entre pontos do espaço e pontos da imagem, é conveniente considerar quatro sistemas de coordenadas, de modo que a transformação de câmera possa ser expressa como a
composta de transformações simples realizadas entre estes sistemas.
- Sistema de Coordenadas do Mundo (SCM)
- Sistema de Coordenadas da Câmera (SCC)
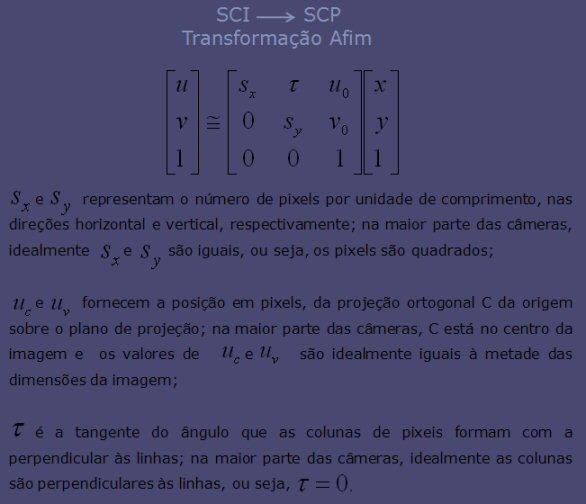
- Sistema de Coordenadas de Imagem (SCI)
- Sistema de Coordenadas em Pixel (SCP)
O processo de imageamento de um ponto do espaço através de uma câmera digital consiste em uma sequência de transformações entre estes espaços.
Código Fonte
- TRABALHO 01 - |
-
TRABALHO 02 - |
- TRABALHO 03 - |